| Resolução de 14 bits e 16 bits | 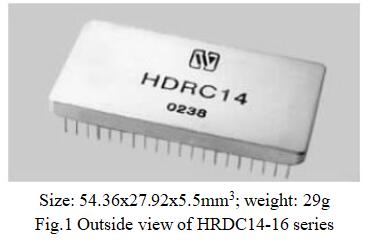 |
| Precisão de 4′ e 2′ | |
| Capacidade da unidade de saída de 2VA | |
| Erro de vetor de raio baixo (0,03%) | |
| Equipado com proteção contra sobretensão e proteção contra curto-circuito | |
| Fornecido com pino de saída telemétrica | |
| Sem a necessidade de ajuste externo | |
| Compatibilidade pino a pino com o produto DRC1745/1746 da empresa AD |
Drive synchro/resolver; sistema de antenas; servo-sistema; integrado
simulador.
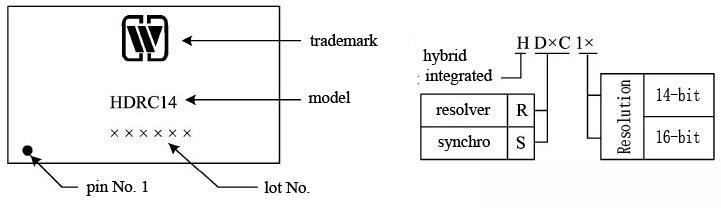
3. Descrição dos Conversores Digital para Sincronizador da Série HDRC14-16 ou Conversores Digital para Resolver
O produto da série HDRC14/HDRC16 é digital para conversores resolver ou
conversores digitais para síncronos de estrutura de circuito integrado híbrido
carga pode ser carga indutiva, carga capacitiva ou carga resistiva, e é | |
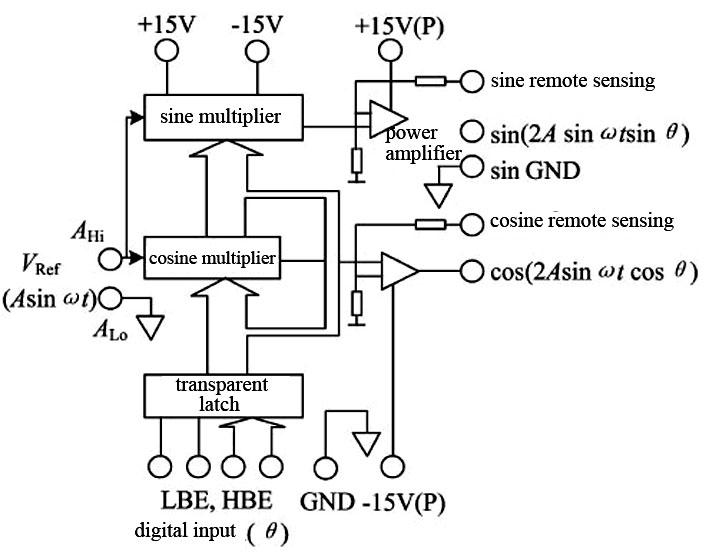
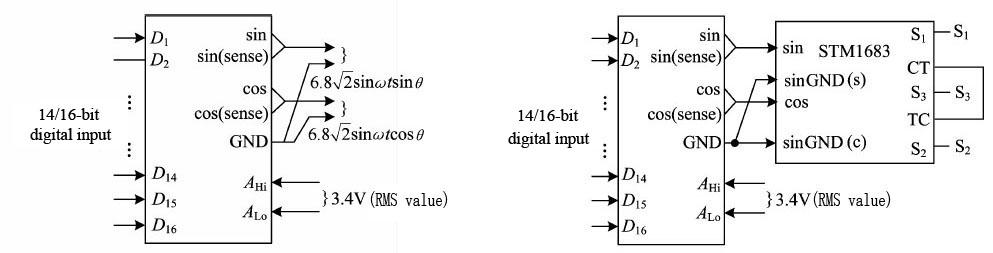
equipado com proteção contra sobrecorrente e sobretensão. A saída de | conversor pode acionar diretamente o resolver, e também pode acionar o controle o transformador de sincronismo conectando um transformador externo. O desempenho exclusivo do produto da série HDRC14/HDRC16 é senoidal e |
saída telemétrica de cosseno. Assim, ao realizar long-line drive, pode-segarantir a precisão do sinal de saída convertido. | Os produtos da série HDRC14/HDRC16 são equipados com trava interna, que é controlado através do HBE final de habilitação de bit alto e fim de habilitação de bit baixo LBE, e pode ser conectado com barramento de dados convenientemente. Os produtos da série HDRC14/HDRC16 são um pacote de metal de 40 pinos em linha duplo. |
4. Desempenho elétrico (Tabela 1, Tabela 2) dos Conversores Digital para Sincronizador da Série HDRC14-16 ou Conversores Digital para Resolver | ||||||
Tabela 1 Condições nominais e condições operacionais recomendadas | Máximo absoluto Valor nominal | Tensão de alimentação Vs: ± 7,25V | Tensão lógica VL: +5,5V | Faixa de temperatura de armazenamento: -65℃~+150℃ | ||
Operação recomendada | condições | Tensão de alimentação Vs: ± 5V | Tensão lógica VL: +5V | |||
Frequência de referência f: 400Hz~2000Hz | - | 14 | - | 16 | Faixa de temperatura de operação TA: -55℃~125℃ | |
Tabela 2 Características elétricas | - | Característica | - | ±2 | HDRC14 | |
HDRC16 | Unidade | Observações | Min. | Máx. | V | |
Min. | Máx. | Resolução | pedaço | Erro de ângulo | V | |
±5,3 Minuto angular | Entrada de referência analógica | 3,23 | 3,57 | 3,23 | V | |
3,57 | - | 25 | - | 25 | Saída de sinal do resolvedor | |
6,46 | 0 | 7.14 | 0 | 6,46 | 7.14 | |
Ganho | (VRef-Vo) | - | 1.999 | - | kΩ | |
2.001 | - | 1.999 | - | 2.001 | Ω | |
Coeficiente de temperatura de ganho de saída | - | 2 | - | 2 | VA | |
PPM/℃ | - | Faixa de frequência de entrada analógica | - | 2.6 | - | |
2.6 | kHz | Impedância de entrada analógica | - | |||









 (2) Fonte de alimentação pulsante
(2) Fonte de alimentação pulsante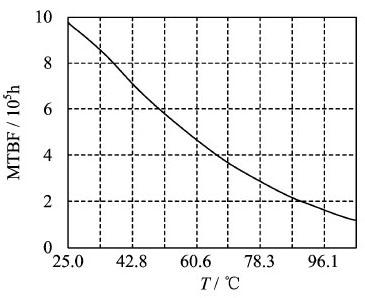

Zu003dcarga de saída | (3) Exemplo de consumo de energia | Existem muitos fatores que influenciam o consumo de energia, a | os quatro exemplos a seguir usam cargas típicas e o pior ângulo digital | estado (45º). Esses exemplos podem ilustrar que o uso de energia pulsante | pode reduzir o consumo de energia. | Aqui, as condições de operação são: | VDCu003d±15V; Vpu003d3V; Voutu003d9,6V (valor RMS é 6,8V); VCA u003d 9,6 V (aproximadamente | igual a Vout); I1u003d292mA (equivalente a uma carga que requer 1,4VA). |
1 | ① Fonte de alimentação DC, θu003d45º, carga resistiva | ② Igual ao exemplo 1, a fonte de alimentação é uma fonte de alimentação pulsante de 3V. | 13 | Ao usar a potência pulsante, o consumo interno de energia é reduzido em 1,75W, sua proporção é de 3,2:1. | ③ Fonte de alimentação DC, θu003d45º, carga indutiva pura | 28 | ④ Igual ao exemplo 3, a fonte de alimentação é uma fonte de alimentação pulsante de 3V. | (4) Carregar |
2 | D2 | A seguir, vamos ilustrar como calcular a carga. Para o controle | 14 | transformador de sincronismo, primeiro é necessário obter o valor de Zso, | que geralmente é fornecido pelo fabricante do sincronismo. O controle | 29 | V- | carga é: |
3 | D3 | Onde, V2 é o valor RMS da tensão do sinal. | 15 | Se um transformador de saída for adicionado ao pino de saída, então 0,25VA deve ser adicionado à potência calculada. | Por exemplo, suponha que o valor RMS do sinal seja 90V, 400Hz, use | 30 | V+ | Transformador de saída externo HRDC14 para acionar o transformador de controle de |
4 | D4 | sincronismo. O uso de transformador externo é para aumentar o valor RMS de | 16 | saída de tensão de HRDC14 de 6,8 V a 90 V exigida pelo controle | transformador. | 31 | Para o transformador de controle do sincronismo, Zso é 700+j4900. | Portanto, a carga ao usar o transformador de controle é: |
5 | D5 | ; então mais o consumo de energia adicional do transformador, o consumo total de energia é 1,48VA. | Este método também pode ser usado para a aplicação que utiliza o | NC | transformador de controle, mas não precisa ser multiplicado por 3/4. | 32 | LE | 6. Curva MTBF (Fig. 3) dos Conversores Digital para Sincronizador da Série HDRC14-16 ou Conversores Digital para Resolver |
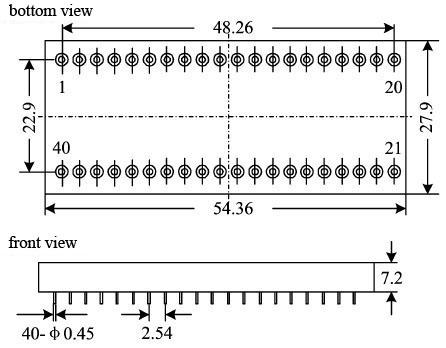
6 | D6 | Fig. 3 Curva de temperatura MTBF | 21 | (Nota: de acordo com GJB/Z299B-98, boas condições de solo previstas) | 7. Designação do pino (fig.4, Tabela 3) dos Conversores Digital para Sincronizador da Série HDRC14-16 ou Conversores Digital para Resolver | 33 | HE | Fig.4 Diagrama esquemático do pino (vista inferior) |
7 | D7 | Tabela 3 Descrição funcional dos pinos | 22 | Alfinete | Símbolo | 34 | Função | Alfinete |
8 | D8 | Símbolo | 23 | Função | Alfinete | 35 | Símbolo | Função |
9 | D9 | D1(MSB) | 24 | entrada digital de 1º bit | D13 | 36 | entrada digital de 13 bits | GNDA |
10 | Terra analógico | entrada digital de 2º bit | 25 | D14(LSB) | entrada digital de 14 bits | - Fonte de alimentação de 15V | NC | entrada digital de 3 bits |
11 | D15 | entrada digital de 15 bits | 26 | Fonte de alimentação +15V | entrada digital de 4 bits | |||
12 | D16(LSB) | entrada digital de 16 bits | 27 | V1+ | Fonte de alimentação +5V |
Extremidade de saída do cosseno | Seleção alta de 8 bits habilitada | entrada digital de 7 bits | Vsin | Extremidade de saída senoidal | RLo | |
1 | Extremidade inferior da entrada de referência | 7 | entrada digital de 8 bits | 13 | V+P | |
2 | +15V potência pulsante | 8 | RHi | Entrada de referência de ponta | entrada digital de 9 bits | |
3 | V-P | 9 | -15V potência pulsante | 15 | Caso | |
4 | Fundamento do caso | 10 | D10 | entrada digital de 10 bits | cos telemetria | |
5 | Extremidade telemétrica de cosseno | 11 | 37-40 | |||
6 | Sem conexão | 12 | D11 |
telemetria pecado | Extremidade telemétrica senoidal |
 | |
necessário, então “HBE” e “LBE” podem estar em circuito aberto. | Todos os pinos de entrada digital têm resistência de pull-up de 27kΩ no interior para serem | conectado com fonte de alimentação de 5V, portanto, se corrente de 50μA em qualquer entrada de trava | pino vaza para a unidade digital externa, ele ainda pode garantir que todas as entradas | os pinos compatíveis com o nível TTL são estáveis. | 8. Tabela de valores de peso (Tabela 4) dos Conversores Digital para Sincronizador da Série HDRC14-16 ou Conversores Digital para Resolver | Tabela 4 Tabela de valores de peso | Bit/(MSB) | Ângulo |
Bit/(MSB) | Ângulo | Bit/(MSB) | Ângulo | 180.000 0 | 2.812 5 | 0,043 9 | 90.000 0 |

Subscribe to our weekly newsletter and receive exclusive offers on products you love!
 X
X




















 Gold Supplier
Gold Supplier